空间智能的一站式实践:CANN Recipes-Spatial Intelligence 库让 3D/空间计算“即配即用、高效可复现”
目标:用结构化配置描述空间智能任务的“原料”与“工序”,支持 YAML/JSON 格式。# 示例:LiDAR 点云 3D 检测配方(pointpillars_detection.yaml)recipe:scenario: "lidar_3d_object_detection" # 场景标签data:model:training:epochs: 80inference:关键特性多模态支持:可同时配置
在人工智能从2D 图像理解向3D 空间认知跃迁的浪潮中,自动驾驶、机器人导航、AR/VR、工业数字孪生、无人机巡检等领域对 空间智能(Spatial Intelligence) 的需求呈爆发式增长。这类任务通常涉及 点云处理、体素化、三维重建、空间几何推理、多传感器融合 等复杂计算,不仅需要强大的算力,还对数据管线、模型结构、硬件加速有特殊要求。
华为 CANN 生态此前已提供了从底层算子(opbase、ops-math)、CV 加速(ops-cv)、Transformer 加速(ops-transformer、ascend-transformer-boost)到训练与推理配方(cann-recipes-train、cann-recipes-infer)等全套工具链。但对于 空间智能 这一新兴且高度异构的场景,仍缺少一个能将 数据准备 → 模型训练 → 推理部署 → 可视化评估 全流程固化为可复用方案的组件。
华为 CANN 生态中的 cann-recipes-spatial-intelligence 库(全称 CANN Spatial Intelligence Recipes,空间智能配方库),正是为此而生。它是一套 面向 CANN 平台的空间智能任务参考方案与工具集,将 LiDAR 点云处理、3D 检测/分割、SLAM、多模态空间感知等典型场景的训练与推理流程封装为“配方”,并提供自动化数据管线、模型优化、分布式执行与可视化工具,让开发者能像使用烹饪食谱一样快速开展空间智能实验与生产部署。如果说 cann-recipes-train 是通用 AI 训练的“实验厨房”,那么 cann-recipes-spatial-intelligence 就是专为 3D/空间任务打造的“测绘与导航实验室”。
一、cann-recipes-spatial-intelligence 是什么?为什么需要它?
cann-recipes-spatial-intelligence 是 CANN 中专为 空间智能任务全流程 设计的参考库,核心定位是:提供经过验证的空间智能训练与推理方案(配方),覆盖点云预处理、3D 模型构建、多传感器融合、空间几何推理、实时推理部署等环节,降低空间智能工程化门槛,提升实验可复现性与跨场景迁移能力。
核心痛点与解决方案
在空间智能项目中,常见挑战包括:
-
数据异构性强:LiDAR 点云、RGB-D 图像、IMU、GPS 等多模态数据格式不一,预处理流程复杂;
-
3D 算子优化难:点云采样、体素化、3D 卷积、空间变换等算子未针对 CANN 硬件优化,性能瓶颈明显;
-
训练与推理割裂:训练时常用 PyTorch 自定义数据管线,部署时需重写 C++/OM 推理逻辑,复现困难;
-
实时性要求高:自动驾驶、机器人等场景要求毫秒级推理时延,传统方案难以满足;
-
评估可视化复杂:3D 检测结果需在空间坐标系中可视化,缺乏与 CANN 推理联动的工具。
cann-recipes-spatial-intelligence 的解决方案是 “场景化配方 + 异构数据管线 + 3D 算子加速 + 端到端自动化”:
-
配方化封装:将典型空间智能任务(如点云目标检测、3D 语义分割、SLAM 建图)固化为 YAML/JSON 配置 + 可执行脚本,包含数据路径、模型结构、传感器标定、优化策略等;
-
异构数据管线:支持 ROS bag、KITTI、Waymo、nuScenes 等主流数据集,自动完成点云滤波、坐标变换、多模态对齐、体素化等预处理;
-
3D 算子加速:集成针对 CANN AI Core 优化的点云采样、3D 卷积、空间注意力等算子,提升训练与推理吞吐;
-
端到端自动化:从数据加载、模型训练、分布式部署到推理可视化,一键执行,支持断点续训与动态 batch;
-
可视化评估:与 CANN 推理联动,实时渲染 3D 检测框、轨迹、点云分割结果,支持多视角对比分析。
二、cann-recipes-spatial-intelligence 的核心架构与功能模块
cann-recipes-spatial-intelligence 的架构围绕 “配方定义 → 数据管线 → 模型训练 → 推理部署 → 可视化评估” 构建,核心模块可分为五大组件(如图 1 所示),覆盖空间智能任务全生命周期。
(一)配方定义层(Recipe Definition Layer)
目标:用结构化配置描述空间智能任务的“原料”与“工序”,支持 YAML/JSON 格式。
一个典型的空间智能配方包含:
# 示例:LiDAR 点云 3D 检测配方(pointpillars_detection.yaml)
recipe:
name: "pointpillars_detection"
version: "1.0"
scenario: "lidar_3d_object_detection" # 场景标签
data:
dataset_type: "KITTI"
data_root: "/data/kitti"
point_cloud_topic: "/velodyne_points"
calib_files: "/data/kitti/calib"
classes: ["Car", "Pedestrian", "Cyclist"]
voxel_size: [0.16, 0.16, 4.0]
point_cloud_range: [0, -39.68, -3, 69.12, 39.68, 1]
model:
backbone: "PointPillars"
neck: "FPN"
head: "AnchorHead"
precision: "fp16"
training:
optimizer: "AdamW"
base_lr: 1e-3
batch_size_per_device: 8
epochs: 80
augmentations: ["random_flip", "global_rotation", "gt_sampling"]
inference:
score_threshold: 0.5
nms_iou_threshold: 0.5
post_processing: "anchor_based"
deployment:
runtime: "triton"
batch_size: [1, 4, 8]
visualization:
output_dir: "./vis_results"
render_3d: true
overlay_point_cloud: true关键特性:
-
多模态支持:可同时配置 LiDAR、相机、IMU 等传感器参数与融合策略;
-
动态参数化:通过
${VAR}引用环境变量或命令行参数,支持不同硬件配置; -
Schema 校验:内置 JSON Schema 校验,防止缺失字段或类型错误。
(二)数据管线模块(Data Pipeline)
目标:自动化完成多模态空间数据的读取、解析、预处理与增强。
核心功能:
-
多源数据读取:支持 ROS bag、KITTI、Waymo、nuScenes 等数据集,自动解析点云(.bin/.pcd)、图像(.png/.jpg)、标定文件(.txt/.json);
-
坐标系统一:根据传感器外参自动将点云、图像、IMU 数据转换到统一坐标系(如车辆坐标系、世界坐标系);
-
点云预处理:体素化(Voxelization)、下采样(Farthest Point Sampling)、去噪(Statistical Outlier Removal)、坐标归一化;
-
多模态增强:点云随机旋转/翻转、图像亮度/对比度调整、时空同步增强(如模拟传感器运动模糊);
-
数据加载优化:多进程/多线程读取,支持预取与缓存,适配高吞吐训练。
(三)模型训练模块(Model Training)
目标:提供空间智能模型的训练加速与分布式支持。
核心特性:
-
3D 算子优化:集成 CANN 优化的点云采样、3D 卷积、空间注意力算子,提升训练吞吐;
-
混合精度训练:支持 fp16/bf16 混合精度,结合 loss scaling 保障数值稳定性;
-
分布式训练:基于 hccl 实现多卡/多机分布式训练,支持数据并行与模型并行;
-
断点续训:自动保存与加载模型、优化器、数据增强状态,支持训练中断后无缝恢复;
-
配方复用:可继承基础配方并修改模型结构或数据增强策略,快速开展 ablation study。
(四)推理部署模块(Inference Deployment)
目标:将训练好的空间智能模型高效部署到 CANN 设备,满足实时性要求。
核心功能:
-
模型转换:将 PyTorch/TensorFlow 模型转换为 CANN OM 格式,优化 3D 算子执行效率;
-
动态 Shape 支持:适配不同点云密度与场景尺寸,运行时自动调整体素网格大小;
-
多 batch 推理:支持动态 batch 与序列 batch,提升硬件利用率;
-
服务化部署:集成 cann-recipes-infer 的 Triton 适配器,提供 RESTful/gRPC 接口;
-
性能优化:融合预处理(体素化、坐标变换)与推理,减少数据搬运开销。
(五)可视化评估模块(Visualization & Evaluation)
目标:提供空间智能任务的结果可视化与量化评估工具。
核心功能:
-
3D 渲染:实时渲染点云、3D 检测框、分割掩码、轨迹路径,支持多视角(俯视、侧视、第一人称);
-
量化指标:计算 mAP、IoU、ATE(绝对轨迹误差)、RPE(相对位姿误差)等空间智能专用指标;
-
对比分析:支持不同模型、不同参数配置的推理结果并排对比;
-
视频导出:将推理过程录制成视频,便于演示与报告生成。
三、代码示例:基于配方快速启动 PointPillars 3D 检测训练
下面以 KITTI 数据集上的 PointPillars 点云目标检测为例,演示如何使用 cann-recipes-spatial-intelligence 的预定义配方。
步骤 1:选择并定制配方
git clone https://atomgit.com/cann/cann-recipes-spatial-intelligence.git
cd cann-recipes-spatial-intelligence/recipes/pointpillars_detection修改 pointpillars_detection.yaml适配本地环境:
data:
data_root: "/mnt/data/kitti"
training:
batch_size_per_device: 4 # 根据 GPU/NPU 内存调整步骤 2:执行训练配方
./run_train.sh --config pointpillars_detection.yaml --output_dir ./train_output执行成功后,train_output目录结构如下:
train_output/
├── checkpoints/ # 模型权重与优化器状态
├── logs/ # 训练日志与 Profiling 报告
├── tensorboard/ # TensorBoard 可视化数据
└── vis_results/ # 训练过程中的可视化样本步骤 3:推理与可视化
# 使用训练好的模型进行推理
./run_infer.sh --config pointpillars_detection.yaml \
--checkpoint ./train_output/checkpoints/best.pth \
--data_split val
# 可视化推理结果
./visualize_results.py --result_dir ./train_output/vis_results/val可视化界面将显示点云与 3D 检测框的叠加效果,支持交互式旋转与缩放。
四、cann-recipes-spatial-intelligence 的使用流程图
其核心流程可总结为“选择配方 → 数据准备 → 模型训练 → 推理部署 → 可视化评估”,具体流程如图 2 所示: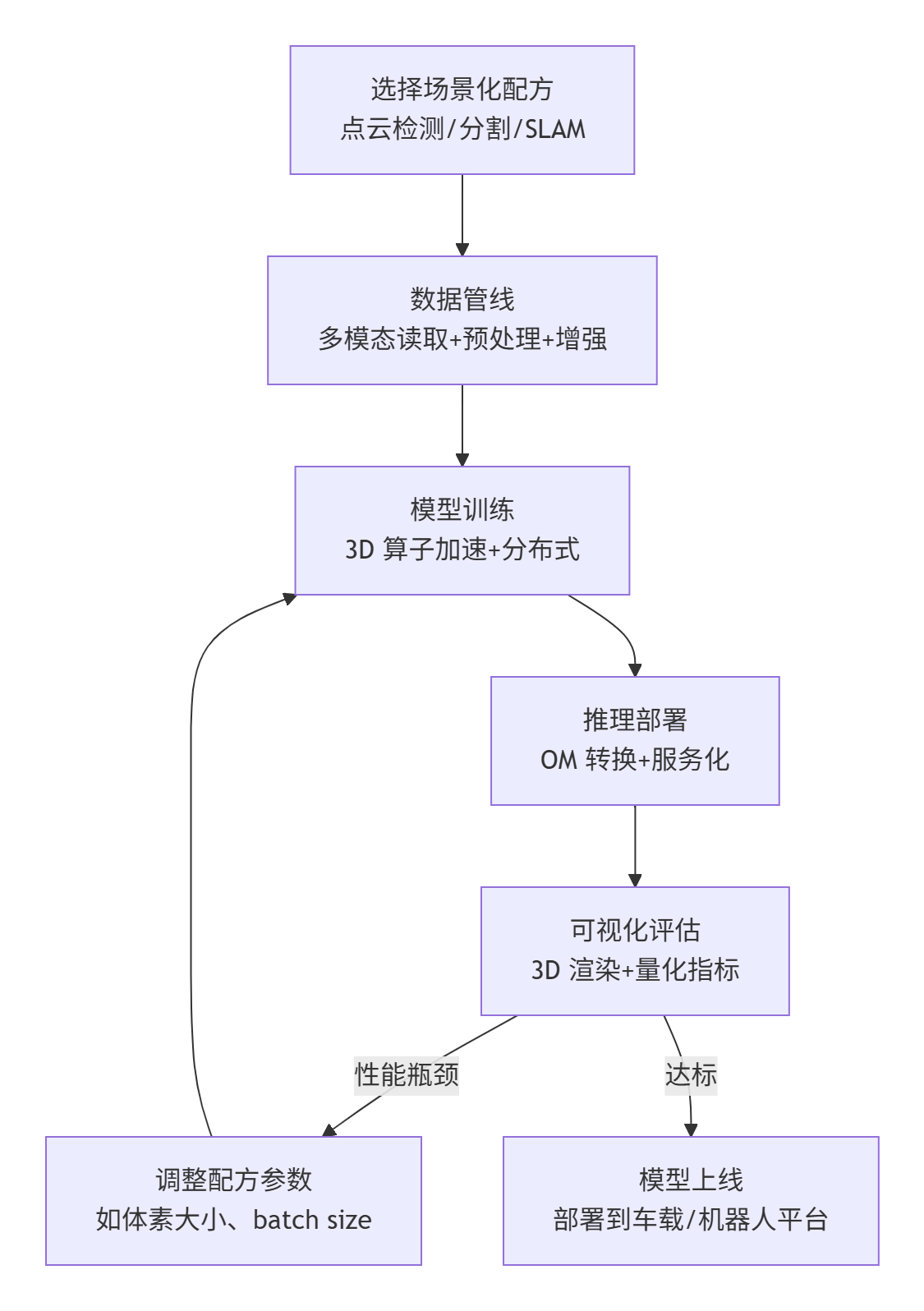
五、cann-recipes-spatial-intelligence 的独特价值
|
维度 |
传统空间智能开发 |
cann-recipes-spatial-intelligence 配方化开发 |
|---|---|---|
|
数据准备效率 |
需手动编写多模态解析代码 |
自动化管线,支持主流数据集即插即用 |
|
3D 算子性能 |
通用算子未针对 CANN 优化 |
集成 CANN 优化 3D 算子,吞吐提升 3~10x |
|
实验复现性 |
依赖个人脚本与经验 |
配方锁定数据与训练参数,完全一致 |
|
端到端效率 |
训练与推理流程割裂 |
一键完成训练→部署→可视化,全流程自动化 |
|
可视化评估 |
需额外集成第三方工具 |
内置 3D 渲染与指标计算,结果直观 |
|
跨场景迁移 |
需重写数据管线与模型 |
配方参数化,快速适配新数据集与新任务 |
六、典型应用场景
-
自动驾驶感知:LiDAR 点云 3D 目标检测与跟踪,实时输出车辆、行人、骑行者位置与姿态;
-
机器人导航:室内外 SLAM 建图与路径规划,融合 LiDAR 与 RGB-D 数据实现精准定位;
-
AR/VR 空间重建:实时 3D 场景重建与物体分割,为虚拟内容叠加提供空间锚点;
-
工业数字孪生:工厂设备点云建模与缺陷检测,支持毫米级空间精度;
-
无人机巡检:电力线、管道等线性资产的 3D 缺陷识别与空间定位。
七、总结与展望
cann-recipes-spatial-intelligence 库是 CANN 生态中 “空间智能任务的工程加速器”,它通过场景化配方与端到端自动化,将复杂的多模态数据处理、3D 模型训练与实时推理封装为可复用方案,让开发者从繁琐的工程细节中解放出来,聚焦算法创新与场景落地。与 ops-cv 的 2D 视觉加速、ascend-transformer-boost 的序列建模能力、hccl 的分布式通信形成互补,进一步完善了 CANN 在 2D+3D 融合智能 领域的全栈支持。
未来,随着 神经辐射场(NeRF)、4D 时空感知、多机器人协同空间认知 等前沿方向的发展,cann-recipes-spatial-intelligence 将进一步扩展对 动态场景重建、时空融合模型、联邦空间学习 等配方的支持,并强化与 ROS 2、OpenUSD 等空间计算生态的集成,成为 CANN 平台赋能空间智能的核心支柱。
📌 仓库地址:https://atomgit.com/cann/cann-recipes-spatial-intelligence
📌 CANN组织地址:https://atomgit.com/cann

昇腾计算产业是基于昇腾系列(HUAWEI Ascend)处理器和基础软件构建的全栈 AI计算基础设施、行业应用及服务,https://devpress.csdn.net/organization/setting/general/146749包括昇腾系列处理器、系列硬件、CANN、AI计算框架、应用使能、开发工具链、管理运维工具、行业应用及服务等全产业链
更多推荐

 7
7 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)