【昇腾AI系列】在200DK上搭建一个ROS环境
前提:在200DK上安装了cann5.0.4版本,ubuntu18的系统。添加ROS软件源sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'添加公钥sudo apt-key adv --keyse
·
前提:在200DK上安装了cann5.0.4版本,ubuntu18的系统。
添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
添加公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
更新
sudo apt update
200DK没有视频输出,所有就只能使用无桌面版的ROS,
sudo apt install ros-melodic-ros-base
sudo apt-get install python-rosdep
更新环境变量:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
下载其他软件包:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
测试是否安装成功:
运行roscore命令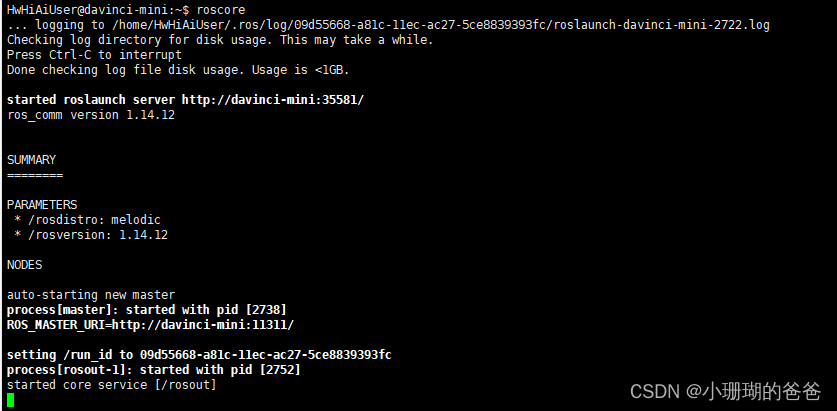
安装usb相机:
sudo apt-get install ros-melodic-usb-cam
坑:200DK的USB只能用于从设备,不能连接相机,所以usb相机是用不上了。只能使用MIPI接口的相机来测试。
后续会继续发布相关ROS教程。

昇腾计算产业是基于昇腾系列(HUAWEI Ascend)处理器和基础软件构建的全栈 AI计算基础设施、行业应用及服务,https://devpress.csdn.net/organization/setting/general/146749包括昇腾系列处理器、系列硬件、CANN、AI计算框架、应用使能、开发工具链、管理运维工具、行业应用及服务等全产业链
更多推荐

 1
1 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)