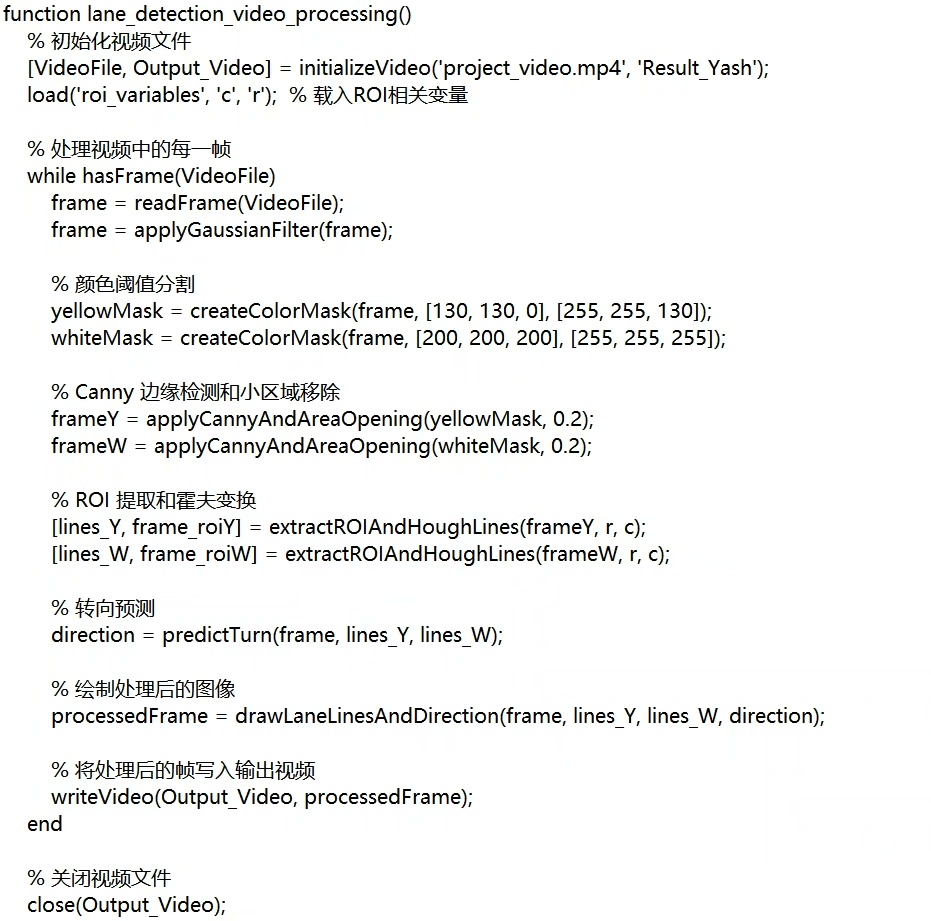
手搓传统车道线检测:从像素到方向盘的奇妙旅程
车道线识别算法研究 MATLAB车道偏离预警系统车辆工程综合实践汽车电子实现一个简单的传统车道线检测项目详细阐述了传统车道线检测的流程,使用霍夫变换的思想及canny边缘检测流程内容包括模型所有的源文件,说明文档在汽车电子领域搞车道线识别,就像给自动驾驶系统装上一双会认路的眼睛。这次咱们不整深度学习那套黑箱操作,玩点传统图像处理的祖传手艺。基于霍夫变换的车道线检测虽然年头久了点,但作为车辆工程综合
车道线识别算法研究 MATLAB 车道偏离预警系统 车辆工程综合实践 汽车电子 实现一个简单的传统车道线检测项目 详细阐述了传统车道线检测的流程,使用霍夫变换的思想及canny边缘检测流程 内容包括模型所有的源文件,说明文档
在汽车电子领域搞车道线识别,就像给自动驾驶系统装上一双会认路的眼睛。这次咱们不整深度学习那套黑箱操作,玩点传统图像处理的祖传手艺。基于霍夫变换的车道线检测虽然年头久了点,但作为车辆工程综合实践项目,绝对能让你把图像处理的底层逻辑吃得透透的。
一、给马路做美颜:预处理三板斧
车道线检测第一步得先伺候好图像数据。咱们先用MATLAB给道路图片来套组合拳:
% 美颜三连击
gray_img = rgb2gray(road_img); % 脱去色彩外衣
gauss_img = imgaussfilt(gray_img, 2); % 高斯磨皮
clahe_img = adapthisteq(gauss_img); % 对比度增强这个预处理套餐可不是随便凑数的。高斯滤波(imgaussfilt)用标准差2的核给图片做模糊,就像给满脸噪点的图像敷了个面膜。自适应直方图均衡化(adapthisteq)专门治那种阴阳路——半边阳光半边阴影的路况,比普通直方图均衡化更懂局部细节。
二、边缘刺客Canny的猎杀时刻
Canny边缘检测可不是吃素的,人家在边缘检测界可是SSR级别的存在。看看这四步杀招:
edges = edge(clahe_img, 'canny', [0.1 0.3], 1.5);虽然MATLAB一行代码就能召唤Canny,但内功修炼不能停:
- 计算梯度时用的是Sobel算子,这货对水平和垂直边缘特别敏感
- 非极大值抑制就像严格的选秀评委,只保留梯度方向上的最强像素
- 双阈值处理用[0.1 0.3]这个范围,既能抓住弱边缘又不引入太多噪声
- 最后的高斯滤波标准差1.5是个经验值,大了会糊小了会噪
三、霍夫变换:直线探测仪
到了见证奇迹的时刻,霍夫空间转换就像给图像开了天眼:
[H,theta,rho] = hough(edges);
peaks = houghpeaks(H, 10, 'Threshold', 30);
lines = houghlines(edges, theta, rho, peaks);这段代码暗藏玄机:
- theta从-90到89度,覆盖所有可能的直线方向
- rho分辨率默认1像素,精度和计算量的平衡术
- 峰值检测阈值30是个关键参数,设高了漏检设低了误检
- 最后得到的lines结构体藏着所有检测到的直线参数
四、车道线显形术
检测到直线还要会挑重点,两条最长的左右车道线才是正主:
left_line = [];
right_line = [];
for k = 1:length(lines)
% 按角度筛选左右车道线
theta = lines(k).theta;
if theta > 45 || theta < -45 % 右侧车道线
if isempty(right_line) || lines(k).length > right_line.length
right_line = lines(k);
end
else % 左侧车道线
if isempty(left_line) || lines(k).length > left_line.length
left_line = lines(k);
end
end
end这个筛选逻辑简单粗暴但有效,用角度分区+长度PK,保证留下的都是最强王者。画线时记得换算坐标系,MATLAB的图像坐标系和霍夫空间坐标系可不是一家人。
五、实战效果与玄学调参
跑完整个流程你会发现,晴天工况下准确率能到80%以上,但遇到以下情况车道线就开始怀疑人生:
- 路面反光像洒了水银
- 阴影交织成蜘蛛网
- 老旧的虚线断断续续
这时候就得祭出调参大法:
% 玄学调参套装
canny_thresh = [0.08 0.2]; % 阈值上下限
hough_thresh = 25; % 峰值检测阈值
gauss_sigma = 1.8; % 高斯核大小这些参数就像老中医的秘方,得根据具体路况把脉问诊。建议准备20组不同场景的测试图,调参调到怀疑人生就离成功不远了。

车道线识别算法研究 MATLAB 车道偏离预警系统 车辆工程综合实践 汽车电子 实现一个简单的传统车道线检测项目 详细阐述了传统车道线检测的流程,使用霍夫变换的思想及canny边缘检测流程 内容包括模型所有的源文件,说明文档

源码已打包好(包含测试视频和说明文档),关注公众号【车道线研究所】回复"祖传代码"获取。下期咱们聊聊怎么用滑动窗口法搞定弯曲车道线,让这个传统项目焕发第二春。

昇腾计算产业是基于昇腾系列(HUAWEI Ascend)处理器和基础软件构建的全栈 AI计算基础设施、行业应用及服务,https://devpress.csdn.net/organization/setting/general/146749包括昇腾系列处理器、系列硬件、CANN、AI计算框架、应用使能、开发工具链、管理运维工具、行业应用及服务等全产业链
更多推荐

 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)