数字图像处理篇---边缘检测
边缘检测是计算机视觉的基础技术,通过识别图像中亮度、颜色或纹理的突变来提取物体轮廓。核心原理是计算相邻像素的差异值,常用方法包括:一阶微分法(如Sobel算子检测坡度)、二阶微分法(如Laplacian算子检测加速度)以及智能化的Canny算法(通过降噪、梯度计算、非极大值抑制和双阈值处理实现精准检测)。这项技术广泛应用于人脸识别、自动驾驶、医学影像等领域,既有人工设计的传统方法,也有基于深度学习
我用最简单的方式解释“边缘检测” —— 这是让计算机拥有“找轮廓”能力的关键技术。
一句话核心思想
边缘检测 = 教计算机“描边”
就像小孩子给图画书里的动物描边一样,边缘检测就是让计算机自动找出图像里所有物体的轮廓线。
一、最生活化的比喻
比喻1:积水找平
想象你在不平的地面上倒一桶水:
-
水会流向低处
-
最后积水停住的地方,就是地势突变的地方(比如台阶边缘、坑边)
-
这些“积水线”就是地面的“边缘”
比喻2:夜间看灯光
晚上看远处大楼的灯光:
-
你其实看不清窗户细节
-
但你能清楚看出大楼的轮廓
-
因为灯光在轮廓处突然消失(明暗突变)
边缘就是图像中亮度、颜色或纹理突然变化的地方。
二、计算机怎么“看见”边缘?
人眼能一眼看出轮廓,计算机需要一步步计算:
关键发现:边缘处的像素值会“跳变”
看这一行像素的亮度值:
平坦区域:[100, 101, 99, 100, 102] → 缓慢变化
边缘处:[100, 98, 95, 60, 55, 50] → 突然跳变!
↑这里从亮突然变暗
核心原理:计算相邻像素的差值,差值大的地方就是边缘!
三、经典检测方法(从简单到智能)
1. 一阶微分法:找“坡度”最大的地方
思想:哪里变化最陡,哪里就是边缘
代表算子:
-
罗伯特算子:最简单的2×2模板,计算对角线差异
-
索贝尔算子(最常用!):3×3模板,更准更抗噪
水平检测核: 垂直检测核: [-1, 0, 1] [-1,-2,-1] [-2, 0, 2] [ 0, 0, 0] [-1, 0, 1] [ 1, 2, 1]
-
分别检测垂直边缘和水平边缘
-
然后合成为完整的边缘图
-
就像用一根棍子横在地上,棍子两端高度差最大的地方,就是边缘。
2. 二阶微分法:找“变化的变化”
思想:边缘是变化率本身发生突变的地方
代表算子:拉普拉斯算子
常见核: [ 0, -1, 0] [-1, 4, -1] [ 0, -1, 0]
-
对噪声非常敏感
-
能同时检测所有方向的边缘
就像开车:一阶微分看速度(变化快慢),二阶微分看加速度(速度变化快慢)。边缘处“加速度”最大。
3. 智能经典:Canny边缘检测(1986年提出,至今仍是标杆)
这是最完善、最常用的方法,分五步:
第一步:降噪
-
先用高斯模糊轻轻柔化图像
-
目的:防止噪声被误检为边缘
第二步:计算梯度
-
用索贝尔算子计算每个像素的边缘强度和方向
-
得到“哪里可能是边缘”的初选图
第三步:非极大值抑制(关键!)
问题:真实的边缘应该是细线,但梯度算出的边缘是“粗条”
解决:沿着边缘方向,只保留梯度值最大的那条线,其他抑制掉
想象一条山脉的山脊线: - 梯度图显示整条山脉都“高” - 非极大值抑制后,只留下最顶端的山脊线 - 边缘从“粗条”变成“细线”
第四步:双阈值检测(最智能!)
-
设定高阈值和低阈值
-
强边缘:梯度值 > 高阈值 → 肯定是边缘
-
弱边缘:低阈值 < 梯度值 < 高阈值 → 可能是边缘
-
非边缘:梯度值 < 低阈值 → 肯定不是边缘
-
第五步:边缘连接
-
强边缘直接保留
-
弱边缘只有与强边缘相连时才保留
-
孤立的弱边缘(可能是噪声)丢弃
Canny就像聪明的侦探:先排除干扰(降噪),收集线索(梯度),去伪存真(非极大值抑制),谨慎判断(双阈值),最后合理连接(边缘连接)。
四、边缘检测能干什么?
1. 计算机视觉的“基础步骤”
就像认字要先认笔画一样:
-
人脸识别:先找到脸的轮廓
-
自动驾驶:先识别车道线、行人轮廓
-
工业检测:检查产品边缘是否完整
2. 图像处理的重要工具
-
抠图:自动找出物体边界
-
艺术效果:生成素描、卡通画
-
图像分割:把图像分成不同区域
-
目标跟踪:跟踪物体的边缘运动
3. 医学影像分析
-
在CT/MRI中找出器官边界
-
自动测量肿瘤尺寸
-
血管分割
五、不同类型边缘的特点
1. 阶梯状边缘(最常见)
亮度:███████████████
███████████████ ← 清晰分界线
亮度:░░░░░░░░░░░░░░░
-
亮度突然变化
-
容易检测
2. 屋顶状边缘
亮度:██████████
/\
/ \ ← 逐渐变亮再变暗
/ \
亮度:░░░░░░░░
-
亮度先升后降
-
比如书脊的反光
3. 线条边缘
亮度:██████████
███ ← 一条亮线在暗背景上
亮度:░░░░░░░░
-
本身就是细线
-
比如电线、发丝
六、为什么边缘检测这么难?(挑战)
1. 噪声干扰
一张照片总有噪点,噪点也是“突变”,容易被误认为边缘。
2. 光照变化
同一物体的边缘,在亮处和阴影处对比度不同,可能检测不全。
3. 纹理干扰
格子衬衫的纹理会产生大量“假边缘”,掩盖真正的轮廓。
4. 边缘不连续
真实物体的边缘可能被遮挡、模糊或断裂。
5. 阈值选择难题
“多强的变化才算边缘?” 这个阈值很难自动确定。
七、现代发展:从人工设计到AI学习
传统方法(上面介绍的):
-
人工设计算子(如Sobel、Canny)
-
依赖经验和调参
深度学习方法(如HED、RCF):
-
用神经网络自动学习“什么是边缘”
-
看过百万张图片后,神经网络自己总结边缘特征
-
优势:更准、更鲁棒、能理解语义
(知道“这是桌子的边缘”,而不仅是“这里亮度突变”)
就像小孩学画画:
-
传统方法:老师教“看到颜色突变就画线”
-
深度学习方法:小孩看无数张画后,自己理解“物体都有轮廓线”
终极生活化总结
边缘检测就是计算机的“描边游戏”:
-
找突变:哪里亮度/颜色突然变化,哪里就是边缘
-
工具有别:
-
简单铅笔:Sobel算子(快速但粗糙)
-
自动铅笔:Canny检测(精准但复杂)
-
AI画家:深度学习(智能但需要学习)
-
-
无处不在:从美图秀秀的“一键素描”到自动驾驶的“识别行人”,底层都在用边缘检测
记住这个核心:所有边缘检测方法,本质都是在回答一个问题——“这个像素和它邻居有多不一样?” 不一样程度超过某个阈值,它就是边缘。
这就是为什么边缘检测是计算机视觉的“ABC”,是让机器看懂世界的第一步。
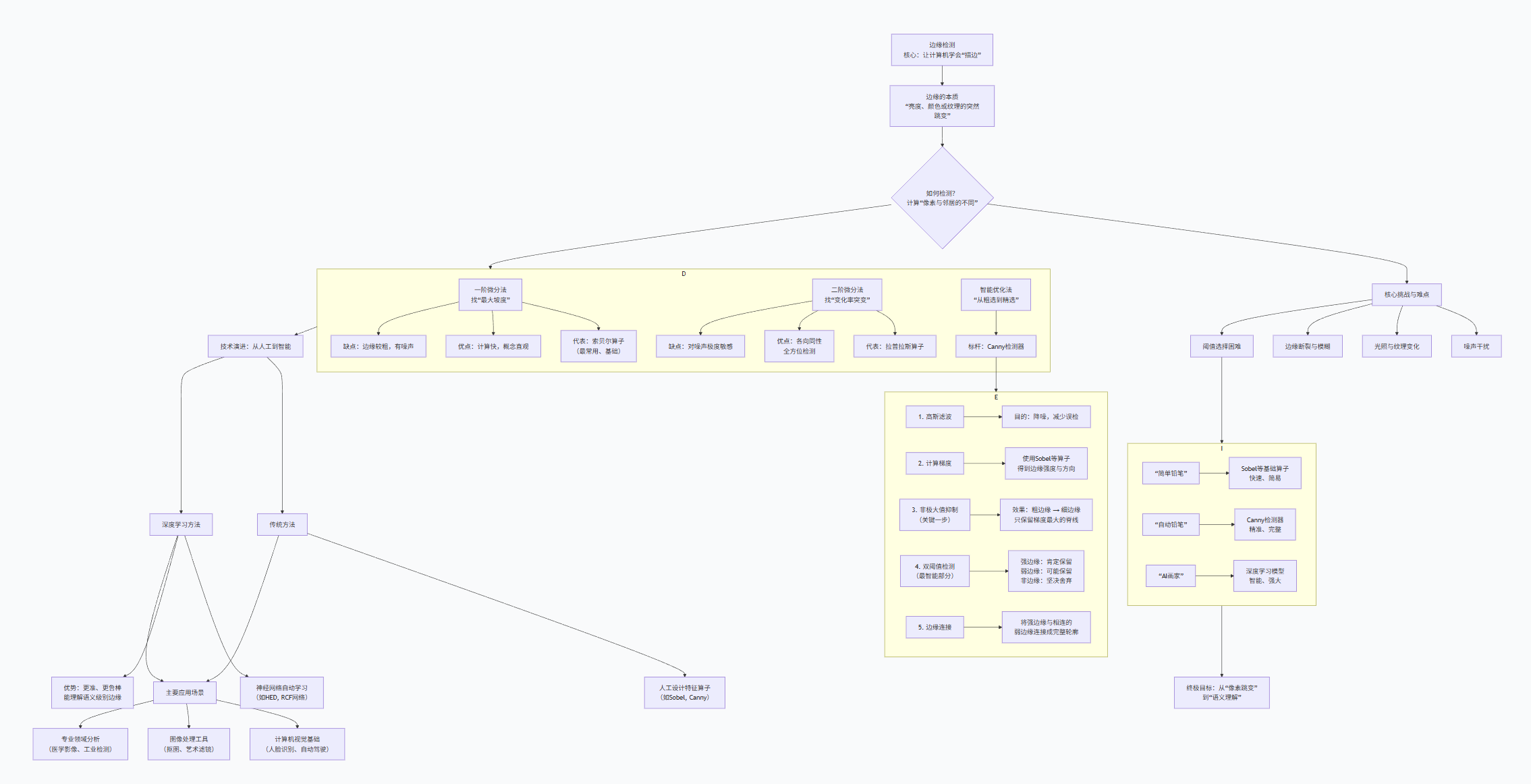
框图核心解读
这张框图清晰地展示了边缘检测技术从原理到应用的全景:
-
从定义到核心:开宗明义,边缘就是图像属性的“突变”,检测的本质是计算像素的“与众不同度”。这是所有方法的共同起点。
-
经典方法三足鼎立:
-
一阶微分(Sobel):是基础与标杆,通过找“最大坡度”来定位边缘,快速直观。
-
二阶微分(Laplacian):从“变化率”角度检测,理论不同但通常不如一阶方法实用。
-
Canny检测器:并非全新原理,而是一个集大成的、标准化的优化流程。它将前两种方法作为中间步骤(如梯度计算),并加入了非极大值抑制(使边缘变细)和双阈值连接(区分强弱边缘)这两个革命性的智能步骤,从而成为实际应用的工业标准。
-
-
从“人工设计”到“AI学习”的演进:
-
传统方法(Sobel, Canny)是工程师总结规律设计的“固定规则”。
-
深度学习方法让模型从海量数据中自行总结规律,能识别更抽象、更符合语义的边缘,代表了未来方向。
-
-
贯穿始终的挑战:框图底部的“核心挑战”提醒我们,边缘检测远非完美。噪声、光照、模糊等问题使得“如何自动确定一个普适的阈值”成为经典方法的根本难题,而这正是AI方法试图攻克的。
一句话总结:边缘检测是让计算机感知物体形状的基础。Sobel等算子是原理核心,Canny是工程实践的智慧结晶,而深度学习正在引领从“低层特征”到“高层理解”的范式转变。

昇腾计算产业是基于昇腾系列(HUAWEI Ascend)处理器和基础软件构建的全栈 AI计算基础设施、行业应用及服务,https://devpress.csdn.net/organization/setting/general/146749包括昇腾系列处理器、系列硬件、CANN、AI计算框架、应用使能、开发工具链、管理运维工具、行业应用及服务等全产业链
更多推荐
 8
8 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)